New control concepts to increase efficiency in concrete block and paver production





Masa presents the first results of an R&D project aimed at developing a new intelligent plant control system at bauma 2025, as the following article illustrates.
In a promising research and development project, Masa is working on a new intelligent plant control system. The aim is to achieve a more harmonious production process, reduced wear and improved energy efficiency, thereby increasing the overall productivity of a concrete block and paver making plant.
The project originated from a bachelor’s thesis in electrical engineering, which was graded A (very good) by the Koblenz University of Applied Sciences. Based on the analysis of speed profiles using distance-time diagrams, the thesis focused on optimising the motion profile of the finger car, one of the key components in the block making plant.
Michael Dolon, Head of Electrical Department, saw great potential in this bachelor’s thesis submitted by dual student Evelyn Lepp: “The results of the thesis pointed the way for the start of a promising development project. It is also a great benefit for us that Evelyn Lepp is now developing the results and ideas of her work as a Masa engineer and driving this project forward.”
The Masa engineers and programmers will present the initial results of the project at bauma 2025.
On the way to an optimized control concept
The bachelor thesis dealt with the question how reducing downtimes and optimising the motion profile of the finger car can lead to an increase in efficiency in the production.
In summary, the analyses showed that the current motion profile of the finger car, which is based on fixed acceleration times and braking distances, can be optimised. The constant use of the maximum permissible speeds of the finger car leads to avoidable waiting times. To achieve optimized motion profiles and a reduction in downtimes, Evelyn Lepp designed an adaptive speed control system using a jerk-limited motion profile of the finger car.
The results of the bachelor‘s thesis were so promising that Masa launched its own R&D project. The path to the new control concept comprises several steps with currently different stages of development.
Step 1: The jerk-limited motion profile as the key to intelligent plant control
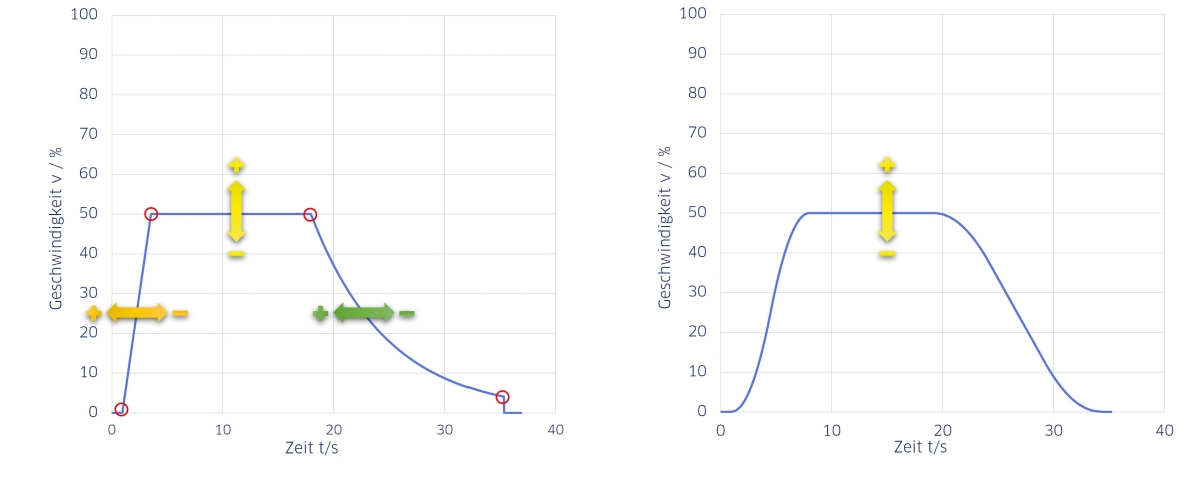
The new concept is based on a jerk-limited motion profile. In general, a motion profile describes the motion of a system, which is determined by various control parameters. In a trapezoidal motion profile, the system accelerates from zero to its maximum speed, maintains this speed for a certain time (or distance) and then decelerates back to zero. The jerk, defined in kinematics as the instantaneous time rate of change of the acceleration of a body, leads to abrupt movements at the transition points. These abrupt movements cause unwanted vibrations that reduce the positioning accuracy.
The aim of a jerk-limited motion profile is to make the movement of the system as smooth as possible. Abrupt changes in speed are avoided by limiting the jerk during acceleration and braking.
The optimized control has decisive advantages for the components of the production plant: Jerk limitation mechanically reduces the load on the drive shafts, gears, and bearings. Electrically, high short-term peak currents caused by abrupt changes in acceleration are avoided. In addition, the risk of the concrete products tipping over on the production board is reduced.
The new control system also allows for simplified handling: the entire motion profile is now created automatically by setting the speed. This reduces the overall time and increases the efficiency of the finger car.
Figure 1 shows an example of a previous and a jerk-limited motion profile of a finger car movement.
In summary, the jerk-limited motion profile proves to be effective in several respects:
Minimized wear on the finger car by reducing the mechanical load;
Increased efficiency by reducing short-term current peaks that can be caused by abrupt changes in acceleration;
Reduction of mechanical vibrations;
Reduced risk of concrete products tipping over on the production boards;
Shorter movement times.
Step 2: Adaptive speed adjustment/ECO mode
The next step in the new control concept is the development of an algorithm for adaptive speed adjustment for the finger car.
Within the production plant, the finger car coordinates the removal of the fresh concrete products from the elevator, the storage and retrieval in the curing chambers and the transfer of the cured products to the downstream area with a minimum of one dry side. For this purpose, the finger car receives the request „Fill curing chamber“ from the wet side and the request „Empty curing chamber“ from the dry side, whereby only one request can be served at a time. A prioritization of the requests in favour of productivity is considered.
To determine the optimum speed of a system, a balance must be struck between various factors. The optimum speed is the one that maximizes the overall efficiency of the drivetrain.
The next step in the new concept is therefore to adaptively adjust the speed of the finger car. However, the control system now also differentiates between two scenarios: At high-capacity utilization, when the finger car has to process many orders in a short time, the control system runs at the maximum permissible speed to ensure the production flow. In contrast, when the workload is lower, the control system does not simply reduce the speed. Instead, in ECO mode, the calculated optimum drive speed is considered, and downtimes are accepted in order to achieve greater efficiency.
Current status
The intelligent plant control concept has already been tested using simulations and compared with the previous control concept. A further load test under real conditions on a finger car in a customer plant is currently being prepared. In the future, other components will also be included in the intelligent plant control system. For this reason, the Masa team also carried out live tests on a cubing device. Here too, the results were extremely promising.
Prospects
Among other things, Masa engineers are currently working on transferring the new concept to other areas of the entire plant. The aim is to realise the advantages already achieved with the finger car there as well.
Harmonious operation: By coordinating the speeds of the individual machine components, unnecessary interruptions are reduced. This leads to a smoother production process and increases overall productivity.
Less wear: Slower and jerk-limited movements reduce the mechanical load on the machine components. This leads to a longer service life for the components.
Improved energy efficiency: By adapting the speed to the actual demand and avoiding interruptions, energy consumption is reduced.
Another approach is the visualisation of energy consumption within a production plant (Fig. 3). Optionally available intelligent measuring systems can be used to measure energy consumption. The so-called smart meters record the voltage, current, power factor and output digitally and in real time. A module for visualising energy consumption is currently in the planning phase at Masa.
Masa will present the initial results of this R&D project at bauma 2025. The development team will be available to answer any questions at stand B1.347.





