Automatisiertes Handling von Betonteilen mit Seilrobotern
● Das Handling von großen und schweren Bauteilen, etwa während der Produktion oder der Kommissionierung, ist zeitaufwändig und häufig nicht automatisierbar, beim
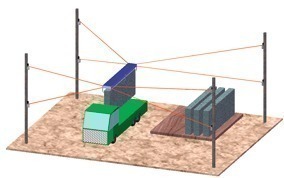
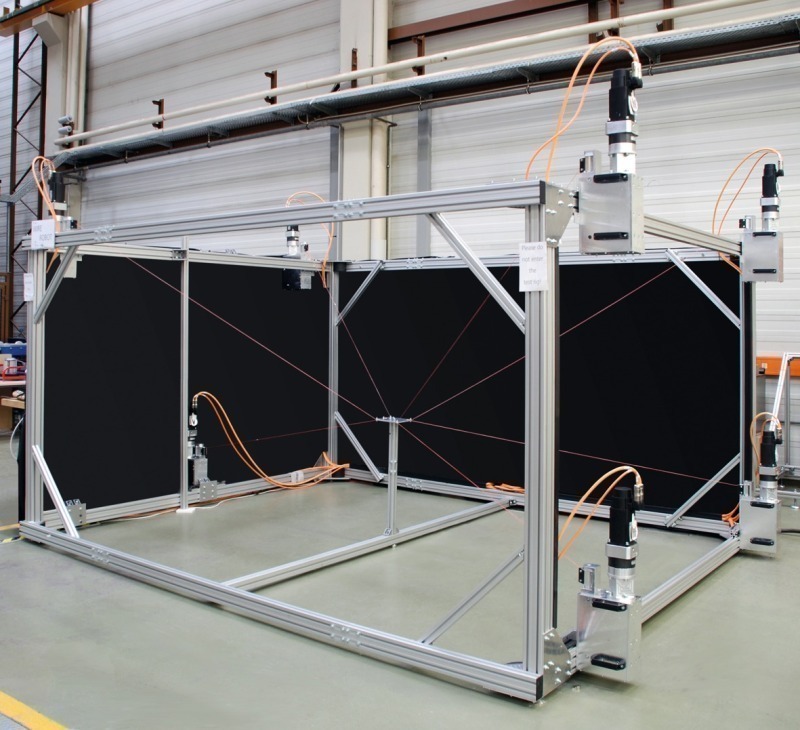
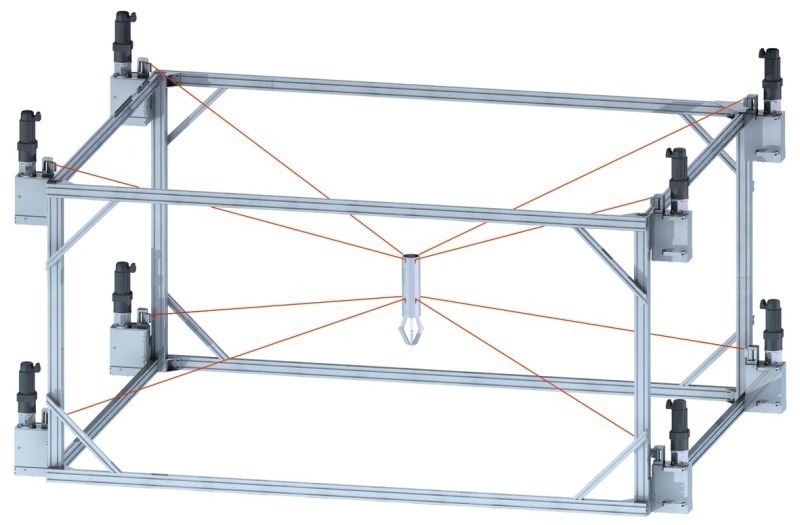
Einsatz von Kransystemen wird jedes Teil einzeln bewegt. Automatisierungslösungen aus der Fertigung kleinerer Bauteile greifen hier nicht. Seilroboter aber können eine Lösung bieten. Im Gegensatz zum Standard-Industrieroboter bewegt ein Seilroboter ein Werkstück durch die koordinierte Ansteuerung mehrerer Seilwinden, die im Greifsystem zusammenlaufen. Seilroboter skalieren sehr gut in Größe und Traglast, auch hallenweite Seilroboter-Systeme mit Traglasten im Tonnen-Bereich sind denkbar. Der Nutzen der Seilroboter liegt in der Präzision und Automatisierbarkeit der Bewegung, so können neue Logistikkonzepte umgesetzt werden. Ein Prototyp wird aktuell am Fraunhofer IPA getestet.
Ausgangssituation
Der Transport von Produkten oder Komponenten in Fertigung oder Kommissionierung ist keine Wert schöpfende Tätigkeit, insbesondere für große und schwere Bauteile aber mit hohem Zeit- und Infrastrukturaufwand verbunden. Kräne sind die Standardlösung für solche Hebeaufgaben. Sie lassen sich aber kaum automatisieren. Das liegt einerseits am bauteilspezifischen Greifen oder dem Befestigen des Werkstücks, andererseits auch an den Schwingbewegungen und der undefinierten Orientierung des Werkstücks.
Ein Handhabungssystem, das die Vorteile des Krans mit den Möglichkeiten der...





