Mehr Effizienz durch multifunktionale Schalungsroboter



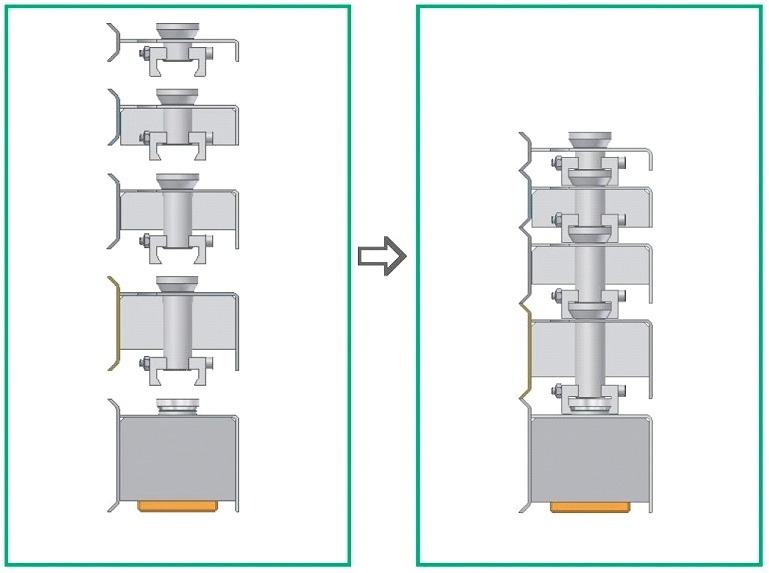

Als vor fast 20 Jahren die ersten Schalungsroboter in Betrieb genommen wurden, handelte es sich um die konsequente Weiterentwicklung vorangegangener Automatisierungsschritte. Begonnen hatte die Automatisierung im Schalungsbereich mit dem „Plotter“, einer Maschine, die mit Hilfe einer Farbdüse in der Lage ist, die Konturen der zu produzierenden Elemente auf die Palette aufzuzeichnen. Kurze Zeit später folgte ein Gerät mit dem nicht nur gezeichnet werden konnte, sondern das bereits mehrere Aufgaben hintereinander ausführen konnte: Querschaler von der Palette abräumen, in einem Lager vorhalten, die Palette reinigen, plotten, die Querschaler wieder setzen und schließlich auch noch ölen.
Die Bezeichnungen, die man für diese erste „Multifunktions-Schalungsmaschine“ finden kann, sind vielfältig – MRP, RES, QRP, etc. – im folgenden Artikel wird es daher immer als Schalautomat bezeichnet.
Der Nachteil dieser Geräte ist vor allem bei der Verwendung in Wandwerken offensichtlich: Von den oft sehr komplizierten Konturen der Wände werden nur die erste und die letzte Kante geschalt, alles dazwischen muss nachträglich per Hand gemacht werden. Das Problem ist jedoch systembedingt und kann an dieser Maschine auch nicht gelöst werden. Durch den Aufbau der Maschine ist es nicht möglich andere...





